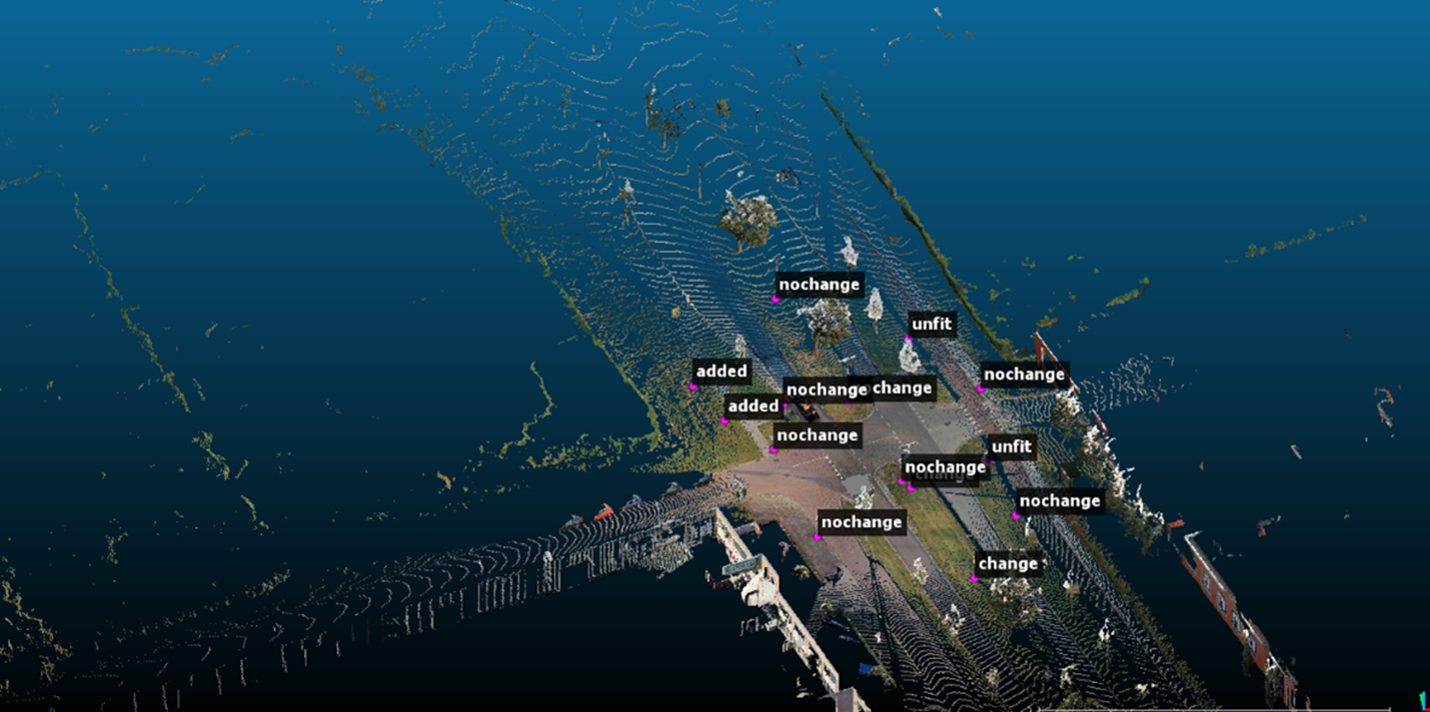
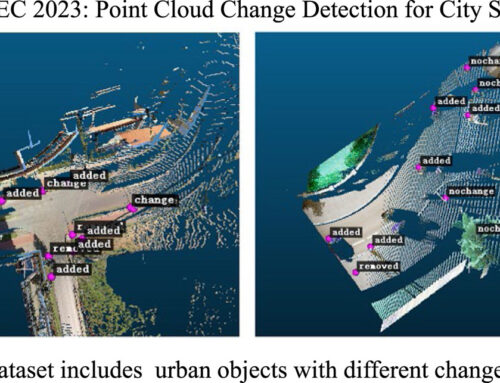
3D Point Cloud Change Detection for Street Scenes
The rapid development of 30 acquisition devices enables us to collect billions of points in a few hours. However the analysis of the output data is a challenging task, especially in the field of 30 point cloud change detection. In this Shape Retrieval Challenge (SHREC) track, we provide a street-scene dataset for 30 point cloud change detection. The dataset consists of 866 30 object pairs in year 2016 and 2020 from 78 large-scale street scene 30 point clouds. Our goal is to detect the changes from multi-temporal point clouds in a complex street environment. SHREC 2021 30 Point cloud change detection Graph convolutional networks Siamese networks We compare three methods on this benchmark, with one handcrafted (PoChaOeHH) and the other two learning-based (HGl-CO and SiamGCN). The results show that the handcrafted algorithm has balanced performance over all classes, while learning-based methods achieve overwhelming performance but suffer from the class-imbalanced problem and may fail on minority classes. The randomized oversampling metric applied in SiamGCN can alleviate this problem. Also, different siamese network architecture in HGI-CO and SiamGCN contribute to the designing of a network for the 30 change detection task.
Ku, T., Galanakis, S., Boom, B., Veltkamp, R. C., Bangera, D., Gangisetty, S., … & Moustakas, K. (2021). RETRACTED: SHREC 2021: 3D point cloud change detection for street scenes, 10.1016/j.cag.2021.07.004