Robust and Fast 3D Saliency Mapping for Industrial Modeling Applications
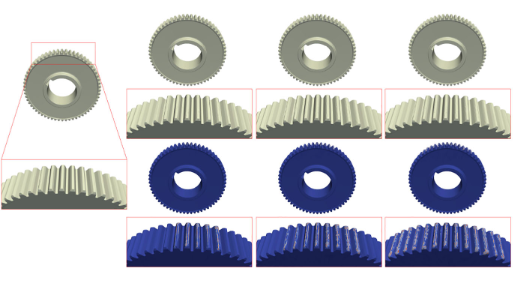
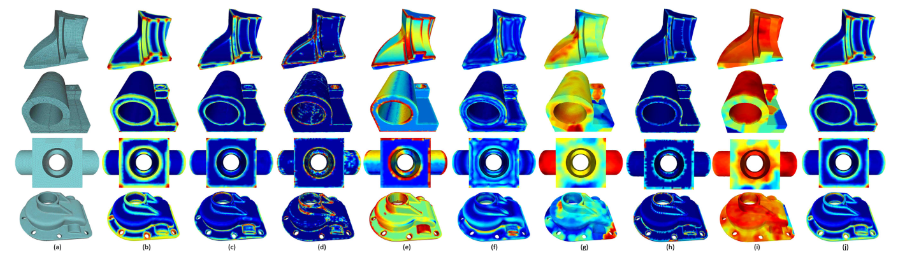
New generation 3D scanning technologies are expected to create a revolution at the Industry 4.0, facilitating a large number of virtual manufacturing tools and systems. Such applications require the accurate representation of physical objects and/or systems achieved through saliency estimation mechanisms that identify certain areas of the 3D model, leading to a meaningful and easier to analyze representation of a 3D object. 3D saliency mapping is, therefore, guiding the selection of feature locations and is adopted in a large number of low-level 3D processing applications including denoising, compression, simplification and registration. In this work, we propose a robust and fast method for creating 3D saliency maps that accurately identifies sharp and small scale geometric features in various industrial 3D models. An extensive experimental study using a large number of 3D scanned and CAD models, verifies the effectiveness of the proposed method as compared to other recent and relevant approaches despite the constraints posed by complex geometry patterns or the presence of noise.
G.Arvanitis, A.S. Lalos and K. Moustakas,”Robust and Fast 3-D Saliency Mapping for Industrial Modeling Applications”, IEEE Transactions on Industrial Informatics, DOI : 10.1109/TII.2020.3003455