Stiffness Modulation of Redundant Musculoskeletal Systems
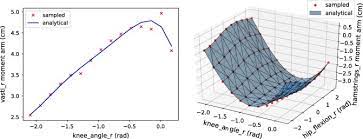
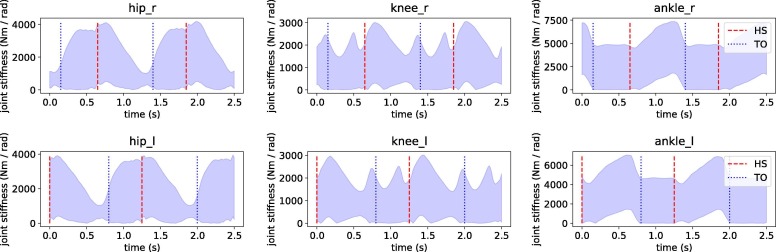
This work presents a framework for computing the limbs’ stiffness using inverse methods that account for the musculoskeletal redundancy effects. The musculoskeletal task, joint and muscle stiffness are regulated by the central nervous system towards improving stability and interaction with the environment during movement. Many pathological conditions, such as Parkinson’s disease, result in increased rigidity due to elevated muscle tone in antagonist muscle pairs, therefore the stiffness is an important quantity that can provide valuable information during the analysis phase. Musculoskeletal redundancy poses significant challenges in obtaining accurate stiffness results without introducing critical modeling assumptions. Currently, model-based estimation of stiffness relies on some objective criterion to deal with muscle redundancy, which, however, cannot be assumed to hold in every context. To alleviate this source of error, our approach explores the entire space of possible solutions that satisfy the action and the physiological muscle constraints. Using the notion of null space, the proposed framework rigorously accounts for the effect of muscle redundancy in the computation of the feasible stiffness characteristics. To confirm this, comprehensive case studies on hand movement and gait are provided, where the feasible endpoint and joint stiffness is evaluated. Notably, this process enables the estimation of stiffness distribution over the range of motion and aids in further investigation of factors affecting the capacity of the system to modulate its stiffness. Such knowledge can significantly improve modeling by providing a holistic overview of dynamic quantities related to the human musculoskeletal system, despite its inherent redundancy.
D. Stanev and K. Moustakas (2019) Modeling musculoskeletal kinematic and dynamic redundancy using null space projection. PLoS ONE 14(1): e0209171. D. Stanev and K. Moustakas, “Stiffness Modulation of Redundant Musculoskeletal Systems”, Journal of Biomechanics, vol. 85, pp. 101-107, Mar. 2019, DOI: https://doi.org/10.1016/j.jbiomech.2019.01.017 (2019)