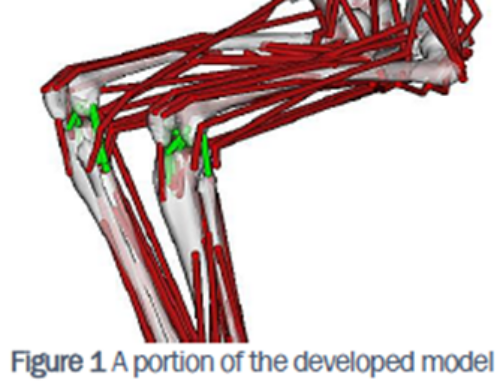
This paper describes an effort to develop an integrated brain and biomechanical system by using a number of pre-existing models. It describes a model of the saccadic oculomotor system incorporating neuromuscular model of the eye and its six extraocular muscles. The position of the eye determines how illumination of a retinotopic input population projects information about the location of a saccade target into the system. A pre-existing saccadic burst generator model was incorporated into the system, which generated motoneuron activity patterns suitable for driving the biomechanical eye. The model was demonstrated to make accurate saccades to a target luminance under a set of environmental constraints. Challenges encountered in the development of this model showed the importance of this integrated modeling approach. Thus, we exposed shortcomings in individual model components which were only apparent when these were supplied with the more plausible inputs available in a closed loop design. Consequently we were able to suggest missing functionality which the system would require to reproduce more realistic behavior. The construction of such closed-loop animal models constitutes a new paradigm of computational neurobehavior and promises a more thoroughgoing approach to our understanding of the brain’s function as a controller for movement and behavior.
S. James, C. Papapavlou, A. Blenkinsop, A. Cope, S.R. Anderson, K. Moustakas, K. Gurney, “Integrating brain and biomechanical models – a new paradigm for understanding neuro-muscular control”, Frontiers in Neuroscience, vol. 12, article 39, January 2018
)