6DoF Haptic Rendering using Distance Maps over Implicit Representations
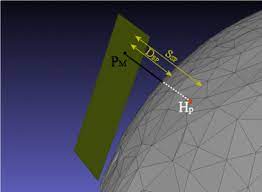
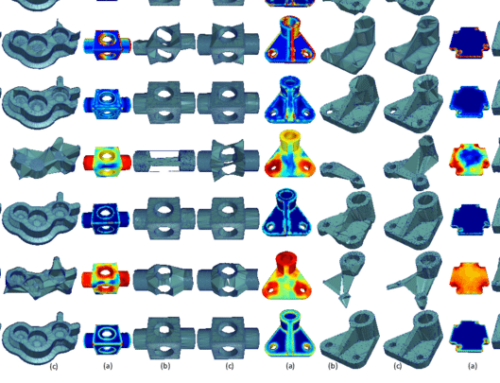
This paper presents a haptic rendering scheme based on distance maps over implicit surfaces. Using the successful concept of support planes and mappings, a support plane mapping formulation is used so as to generate a convex representation and efficiently perform collision detection. The proposed scheme enables, under specific assumptions, the analytical reconstruction of the rigid 3D object’s surface, using the equations of the support planes and their respective distance map. As a direct consequence, the problem of calculating the force feedback can be analytically solved using only information about the 3D object’s spatial transformation and position of the haptic interaction point. Moreover, several haptic effects are derived by the proposed mesh-free haptic rendering formulation. Experimental evaluation and computational complexity analysis demonstrates that the proposed approach can reduce significantly the computational cost when compared to existing methods.
K. Moustakas, “6DoF Haptic Rendering using Distance Maps over Implicit Representations”, Multimedia Tools and Applications ,to appear, 2015 ,Multimed Tools Appl DOI 10.1007/s11042-015-2490-z