The Role of Modularity in Multimodal Simultaneous Localization and Mapping Systems
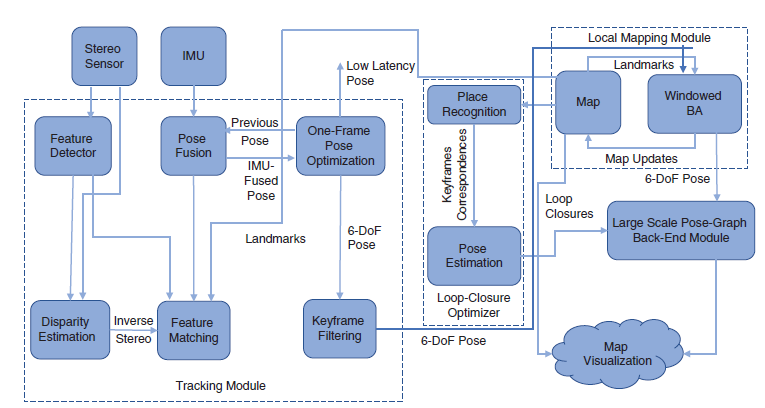
Simultaneous localization and mapping (SLAM) refers to the problem of mapping an environment using measurements from mobile sensors while simultaneously estimating the motion of those sensors relative to the map Modular architectures are required to enable the commoditization and fast penetration of SLAMs in the emerging mobile computing systems
P. Kapsalas, A.S Lalos, D. Serpanos and K. Moustakas, “The Role of Modularity in Multimodal Simultaneous Localization and Mapping Systems”, IEEE Computer, vol. 54, pp. 63-67, March 2021