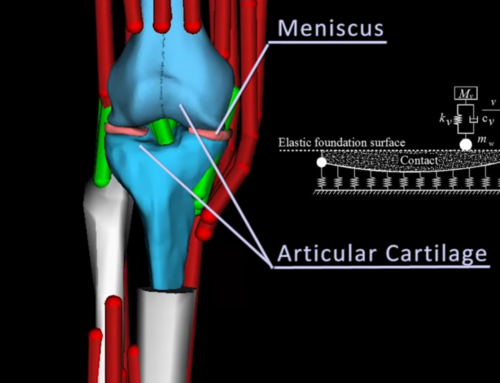
The research developed in this thesis first deal with the problem of capturing the human body motion and then concentrates on the creation of musculoskeletal models, which can capture and accurately study its dynamical behavior. The Microsoft’s Kinect sensor was utilized to capture the human motion. The model used for the simulations is the human lower extremity with 86 attached muscles. For the analysis phase we used some common methods such as inverse kinematics, inverse dynamics, computed muscle control and forward dynamics and we showed a general pipeline strategy for generating correct results.