Point-based Similarity Estimation Between 2.5D Visual Hulls and 3D Objects
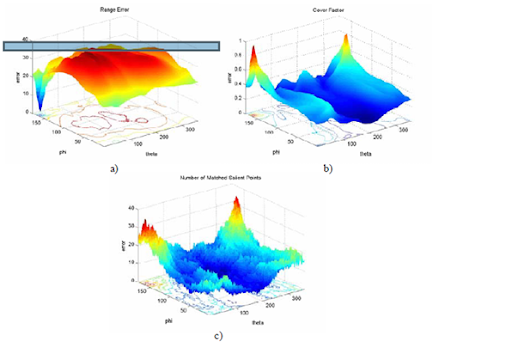
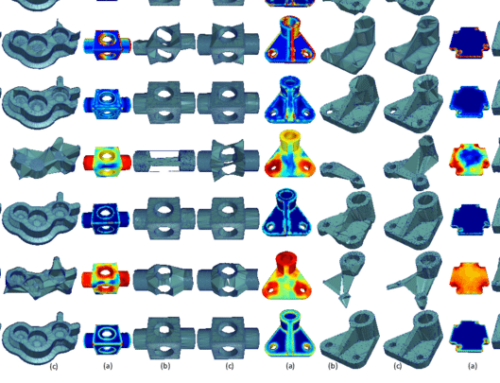
This paper presents a novel framework for point-based similarity estimation between 3D objects and 2.5D visual hulls. Initially, the protrusion map is estimated for both the visual hull that is generated by a range image and the 3D model that is followed by the extraction of the salient features that correspond to the highly protruding areas of the objects. Then, based on the concept that for a 3D object and a corresponding query range image, there should be a virtual camera with such intrinsic and extrinsic parameters that would generate an optimum range image, in terms of minimizing an error function that takes into account the visual hull and the salient features of the objects, when compared to other parameter sets or other target 3D models, matching is performed via estimating dissimilarity within the range image and salient feature space. Experimental results illustrate the efficiency of the proposed approach in benchmark datasets
K. Moustakas, G. Stavropoulos, D. Tzovaras, “Point-based Similarity Estimation Be-tween 2.5D Visual Hulls and 3D Objects”, International Journal on Computer Science and Information Systems, vol.7, no.1, pp. 18-31, September 2012.